Drive Control
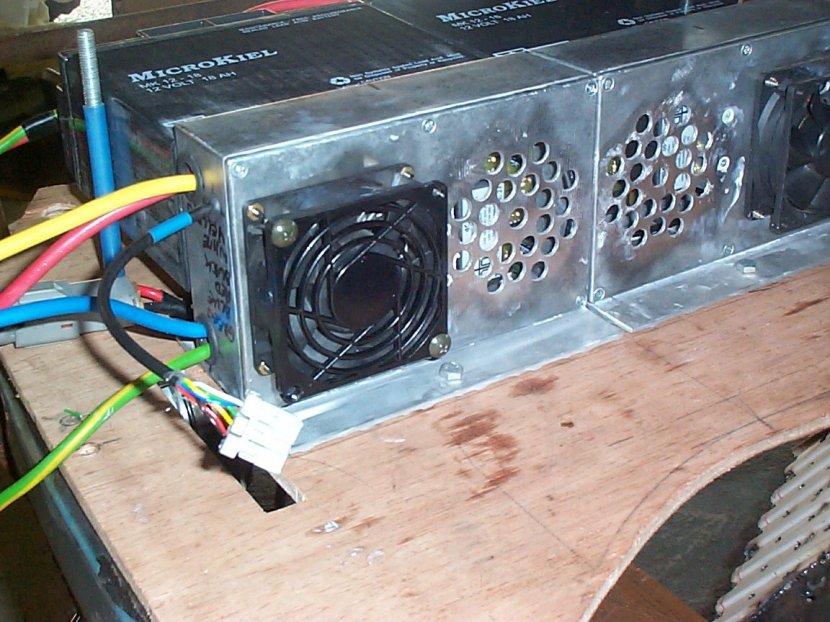
Ruf Dougal's traction motors are controlled by 2 off 4QD NCC60-24's wired in 10mm squared panel flex wire and mounted in die cast boxes. Each box has been fitted with a 12v computer PSU fan (also running at 24v) and drilled to give forced cooling. The die cast boxes were then pop riveted vertically to a piece of aluminium treadplate for additional cooling, underside protection and ease of mounting to the chassis. All aluminium interfaces were smeared with heat sink compound to keep the controllers cool.Each motor was taking about 120 Amps at clutch slip. So to achieve somewhere near this current the controllers have to be kept as cool as possible.
Motor Controllers
Ruf Dougal's traction motors are controlled by 2 off 4QD NCC60-24's wired in 10mm squared panel flex wire and mounted in die cast boxes. Each box has been fitted with a 12v computer PSU fan (also running at 24v) and drilled to give forced cooling. The die cast boxes were then pop riveted vertically to a piece of aluminium treadplate for additional cooling, underside protection and ease of mounting to the chassis. All aluminium interfaces were smeared with heat sink compound to keep the controllers cool.Each motor was taking about 120 Amps at clutch slip. So to achieve somewhere near this current the controllers have to be kept as cool as possible.
Interface Board
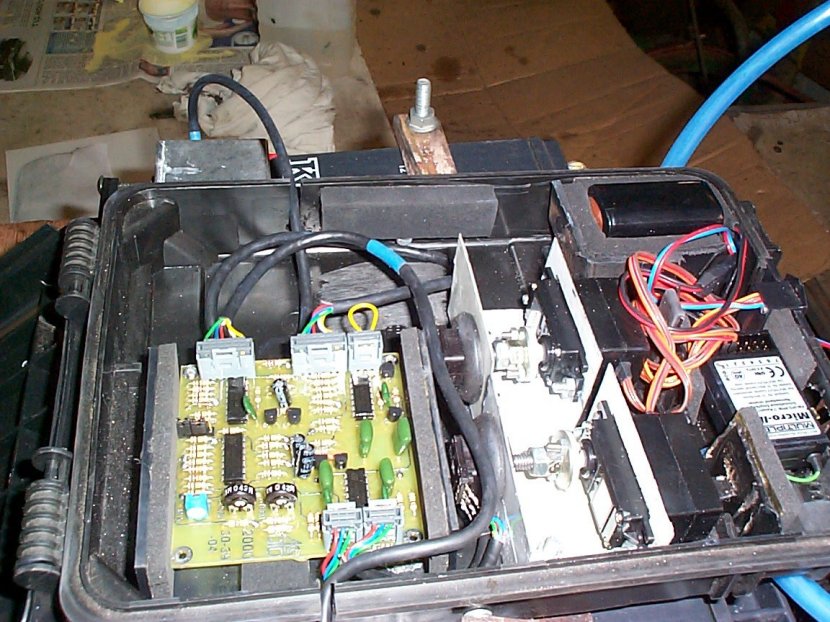
Ruf Ruf Dougal was originally set up with the 'Delbots' interface board which was very easy to set up and appeared to work fine but the range was only about 3 meters even with all motors disconnected etc. After some discussion with Derek Foxwell (Robot Wars Technical guy and Delbots founder) it was decided that there was a problem working with my Radio Control gear. (They had also found some problems with some gyros). Given the time constraints I changed to the much less user friendly 4QD DC-111 board driven by 2 potentiometers. This of course needed a separate ignition circuit and failsafes.
Ignition
The 4QD board has an ignition switch connector which is needed to prevent the robot creeping with the sticks in the off position. I controlled this with a home made 'Ken Hewitt' switch, diagrams of which can be found on his website. See the 'Links & Thanks' and 'Constructor Tips' pages on this site.
Failsafes
My Radio gear had inbuilt failsafes and sufficient spare channels to include a separate ignition channel. See the 'Radio Control' page on this site.
 |
 |
| Motor Controller | Delbots Interface |
 |
 |
| 4QD DC-111, Pots & Servos | R/C switch |